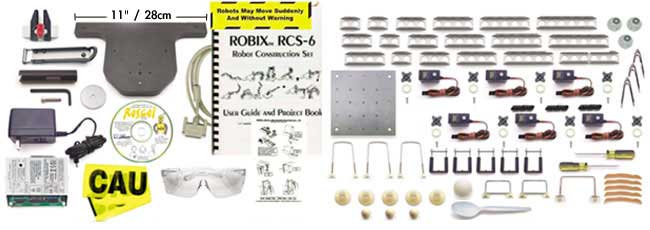

Components change as improvements are made and new ideas are incorporated. The Computer (not included in set), can be either a PC running Windows XP,7,8 or a Linux PC running version 2.6 or later. Storage/Transport Case is a rugged multi-compartment polypropylene toolbox. The Manuals and Tutorials are now on this website and may be reprinted freely. Printed manuals are no longer included with the set. Laminated Quick Reference Card has drawings of assembled joints on one side, and script/edit/run programming details on the other. Rascal Software 1.1.0 for Win 2000/XP/Vista and PC-Linux 2.6 or later. The CD includes 40 minutes of Video. The first 10 minutes showing 11 sample Rascal projects in action. Next comes a 30 minute step-by-step narrated video showing an arm being assembled and programmed.. Power Supply (6V 5A universal input switcher) runs the Usbor servo controller and the servos. Usbor servo controller connects to your PC USB port using the supplied cable and runs up to 32 servos (the Rascal set comes with 6) under software control. The Usbor also has a 32 channels of 8 bit A/D.  USB Cable, 6' (1.8 m) with molded plugs. The Servos used in the Robix Rascal
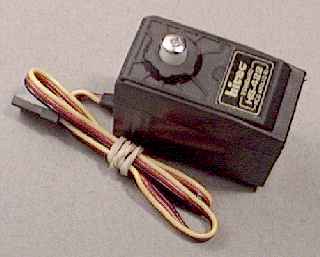
This is a "standard" size hobby servo, the Hitec HS422 widely available at commodity prices. It has a nominal torque of 40 oz-inches (2.9 Kg-cm). The longest dimension is 1.6" (42 mm). The usual mounting ears found on standard servos have been removed so that successive robot joints may be close together. In the Rascal set we have also extented the nominal 10" (25cm) servo cable to approximately 46" (117cm).
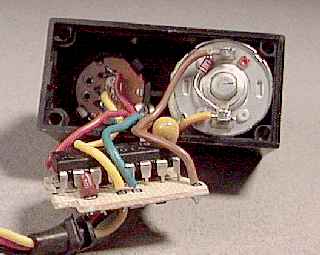
The top housing has now been removed to show the nylon gears. The ratio is 100:1. The inner half of an iron-oilite bearing is shown on the output shaft. The shaft has a total of 180 degrees rotation, and is coupled on its underside to a potentiometer which serves as the positional encoder of the servo.
Removing the bottom cover of the servo shows the electronics: integrated signal decoder and motor driver on circuit board at front; positional encoder (potentiometer) at upper left, and the drive motor itself at upper right. 8 Sets of Custom Servo-to-Link Mating Parts let the robot builder connect the servo output shaft to the Rascal links by tightening only a single screw. 11 Servo Clamps secure servos to links and also to the Bread Board Base in a variety of configurations. Spiral Cable Wraps and twist ties allow easy "dressing" of servo wires along your robot's body. The Robix Rascal Links  If servos are the "muscles" of the robots, then the links are the "bones". (A) The kit includes 18 links in all: 4 each of 2-, 3-, and 4-hole links, and 3 each of 5- and 6-hole links. Constructions require only about 7 to 10 links at a time, but the full 18-piece set (for than 4' (1.3 m) total length gives great flexibility in designing and proportioning your robots. The links are made of hardened 6061-T6 structural grade aluminum alloy, which is precision-formed before hardening with our custom die. The links are then clear-anodized for durability and appearance. (B) The Diagonal Link has several other parts mounted to it so that it can function as a load-bearing and damping member in arm-like constructions using the Arm Base. Gripper Assembly mates easily with two servos, one to open and close the fingers, and a second servo which acts as the gripper's "wrist". If, for example, your project is an arm with a wrist and gripper, you will have the remain 4 servos for the other arm motions. Remember, though, that not all arms need grippers, and not all robots are arms! The gripper can accomodate objects up to about .9" (~23 mm). Pivot Post Base with pivot post and fasteners is used with the diagonal link for most arm-like constructions. This Base is now a single "wing" of machined, plated and powder-coated steel supported by low rubber feet. This Base with attached pivot post assembly (tools included), is used in the Chemist, Golfer, Coffee, and Bubbler projects. Bread Board Base is used for "generic" constructions. Servo clamps allow quick, flexible attachment of servos to this base. This base, for example, is used in the Fingers, Thrower, Dancer, and 3legs projects. Glides for walker projects such as 3legs. The parts are on top of the Bread Board Base in the picture for visibility. Rubber Bands for constructions such as Fingers. The bands stretch onto links to provide gripping surfaces. Manipulanda for robot construction, including small wooden balls and plastic "tees" for pick-and-place demonstrations. The table tennis ball is used for throwing or hitting by models, and the spoon is used in Thrower and also just as a spoon in Coffee. Tools that are needed come with the set: A hex key and a phillips #0 screwdrivers. Other fasteners such as plastic wing-nuts may be finger-tightened. Safety Goggles, which fit over glasses. Generic "Caution" Tape of yellow and black diagonal stripes for marking a "do not enter" area around robot projects. [an error occurred while processing this directive] |